训练参数设置¶
检查点文件¶
| 关键词 | 类型 | 默认值 | 描述 |
|---|---|---|---|
run_name |
str |
xequinet |
训练任务的名称,检查点文件将以此命名 |
resume |
bool |
false |
是否断点续训 |
ckpt_file |
str |
null |
用于载入参数的检查点文件名 |
finetune_modules |
list[str] |
null |
含有列表中关键词的模型参数才会被优化 |
示例 1:断点续训¶
trainer:
run_name: spice-v1
ckpt_file: spice-v1_last.pt
resume: true
训练开始时会读取 spice-v1_last.pt 检查点文件,读取模型参数的同时,还会读取 Epoch 信息,优化器参数和学习率调整器的参数等。接着从检查点文件断开的 Epoch 开始继续训练。
示例 2:微调模型¶
trainer:
run_name: spice-v2
ckpt_file: spice-v1.pt
resume: false
finetune_modules: [output, embed]
...
训练开始时将会读取 spice-v1.pt 检查点文件,只载入其中的模型参数。训练过程中仅优化名字中带有 output 和 embed 的参数(如 module.mods.embedding.embedding.1.weight 和 module.mods.output_energy.out_mlp.0.weight 等)。接着从头开始训练。训练过程中保存的参数将会命名成 spice_v2_0.pt 和 spice_v2_last.pt ,前者是验证误差最好的模型,后者是上一个 Epoch 结束时自动保存的检查点模型。
损失函数¶
| 关键词 | 类型 | 默认值 | 描述 | 可选参数 |
|---|---|---|---|---|
lossfn |
str |
smoothl1 |
损失函数类型(不区分大小写) | mae(l1), mse(l2), smoothl1 |
losses_weight |
dict[str, float] |
- | 误差函数各项组分的权重 |
损失函数种类¶
这里可以用的损失函数有三种,L1 Loss、L2 Loss 和 两者兼具的 SmoothL1 Loss。三者的函数形式和图像如下(图中为了美观给 L2 Loss 乘了一个 0.5 的系数):
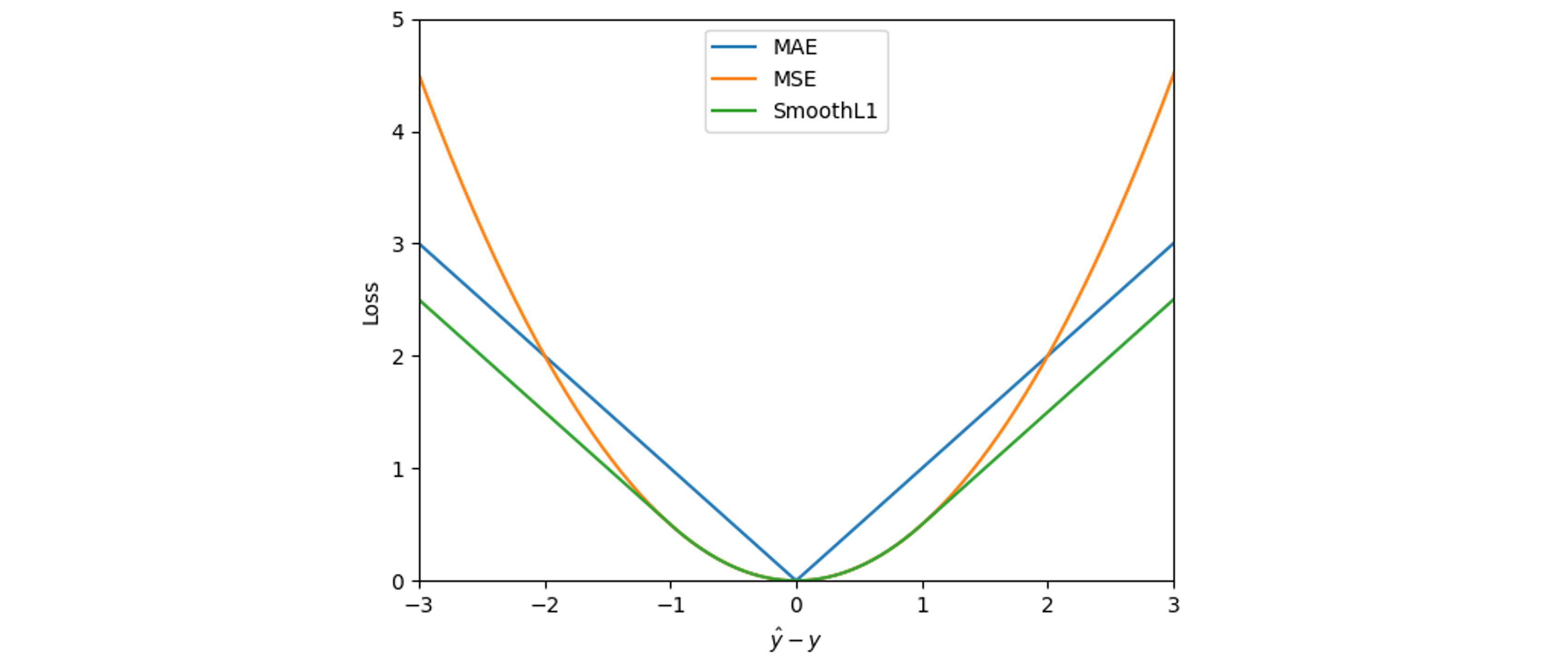
MAE Loss,即 L1 Loss:
MSE Loss,即 L2 Loss:
SmoothL1 Loss:
式中 \(\hat{y}\) 表示真值,\(y\) 表示预测值。
损失权重¶
losses_weight 接受一个字典,用于给损失函数的各组分分配一个权重。比较常见的情况时训练力场模型时同时监督能量和力,我们希望能量和力误差的权重比时 1:1000,就可以这样设置:
trainer:
...
lossfn: smoothl1
losses_weight:
energy: 1.0
forces: 1000.0
...
这样就代表着总损失 \(\mathcal{L} = 1 \times l \left( \hat{E}, E \right) + 1000 \times l \left( \hat{\mathbf{F}}, \mathbf{F} \right)\)。
当然 energy 和 forces 须在数据参数的 target 栏中声明,这样程序才会从数据集中读取相应的标签用于损失计算。
优化器¶
关键词 |
类型 |
默认值 |
描述 |
可选参数 |
|---|---|---|---|---|
|
|
|
优化器类型(不区分大小写) |
|
|
|
|
传给优化器的参数,可见 torch.optim |
优化器种类¶
Adam 宇宙了说是。
Adam:通常来说 Adam 作为通用首选应该是没什么问题了,适应大多数任务AdamW:就是加了 Weight Decay 的 Adam,相比之下修正了权重衰减的实现方式,因此需要加权重衰减的时候记得使用 AdamWNAdam:在 Adam 基础上融合 Nesterov 动量,适用于需要快速收敛的任务(如小数据集训练)。RAdam:在训练初期对自适应学习率进行方差修正,适合训练初期需要稳定的任务(如小批量数据)。
示例¶
trainer:
...
optimizer: AdamW
optimizer_kwargs:
betas: [0.9, 0.999]
weight_decay: 0.01
...
这样设置的话,就会使用 AdamW 优化器,参数设置上 betas=(0.9, 0.99)、weight_decay=0.1(YAML 文件没有 Tuple,这里所幸传 List 进 Optimizer 也能跑)
学习率¶
| 关键词 | 类型 | 默认值 | 描述 |
|---|---|---|---|
max_lr |
float |
5e-4 |
学习率最大值 |
min_lr |
float |
0.0 |
学习率最小值 |
学习率变化的上限和下限,在不同的学习率调整器下含义各不相同。
学习率预热¶
| 关键词 | 类型 | 默认值 | 描述 | 可选参数 |
|---|---|---|---|---|
warmup_scheduler |
str |
linear |
学习率预热方式(不区分大小写) | null, linear, exponential, untuned_linear, untuned_exponential, RAdam |
warmup_epochs |
int |
10 |
学习率预热 Epoch 数 | - |
学习率预热是使用的 pytorch-warmup 库,简单来说就是将学习率缓缓从 0 开始上升,避免初始学习率过大导致训练不稳定的问题。warmup_epochs 仅针对 linear 和 exponential 生效,程序会将预热的 Epoch 数量换算成梯度下降的步数。以余弦学习率变化为例,下图为预热步数为 \(\tau\) 的学习率变化趋势:
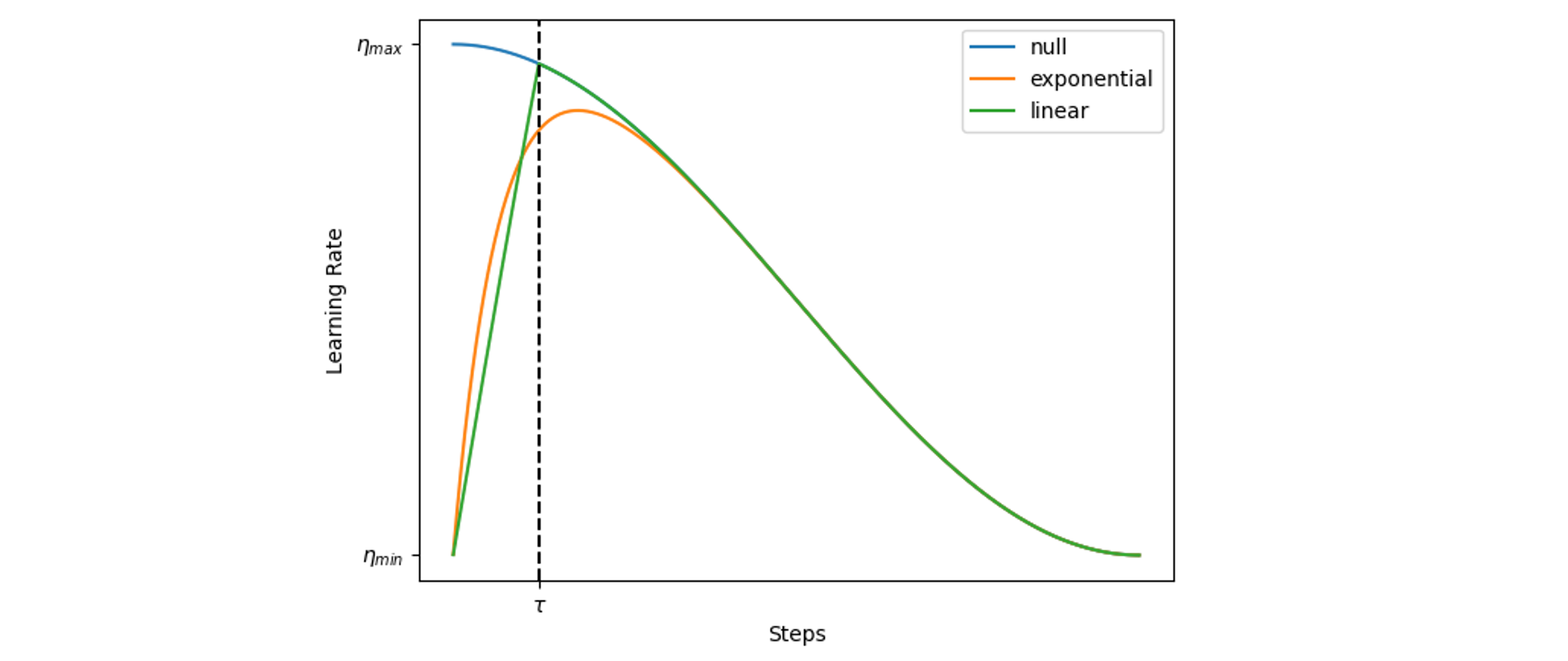
相当于在学习率上 \(\eta_t\) 乘上一个预热系数 \(\omega_t \in \left[ 0, 1 \right]\),即
线性预热¶
线性预热分两种,手动设置预热步数的 linear 和自动根据 Adam 类优化器的 \(\beta_2\) 值设定预热步数的 untuned_linear。其预热系数为:
其中,\(t\) 为当前步数,\(\tau\) 为预热步数,对于 untuned_linear,\(\tau = \lfloor \frac{2}{1-\beta_2} \rfloor\)
指数预热¶
指数预热同样分两种,预热系数为(这里和官方不一样,官方这里没有 2,我这里是为了和 untuned_exponential 保持一致):
同样,\(t\) 为当前步数,\(\tau\) 为预热步数,对于 untuned_exponential,\(\tau = \lfloor \frac{2}{1-\beta_2} \rfloor\)
RAdam 预热¶
这个有点复杂,懒得写了,看官方解释吧🤭
学习率调整器¶
| 关键词 | 类型 | 默认值 | 描述 | 可选参数 |
|---|---|---|---|---|
lr_scheduler |
str |
cosine_annealing |
学习率调整方式(不区分大小写) | cosine_annealing(cosine), cosine_annealing_warm_restarts( cosine_restarts), reduce_on_plateau(plateau) |
lr_scheduler_kwargs |
dict |
{} |
传给学习率调整器的参数 | - |
余弦退火¶
学习率按余弦函数周期性调整,当前第 \(t\) 步的学习率 \(\eta_t\) 为:
式中 \(\eta_{\min}\) 和 \(\eta_{\max}\) 分别表示最小和最大学习率,\(T_{\max}\) 表示余弦函数变化的半周期,学习率变化情况如图所示:

尽管上述公式和图像中 T_max 表示半周期的步数,但是我们一般更想根据 Epoch 数调整,因此参数设置时 T_max 指的是半周期 Epoch 数,程序会自动调整为步数传给学习率调整器。
trainer:
...
max_lr: 1e-3
min_lr: 0.0
lr_scheduler: cosine_annealing # cosine
lr_scheduler_kwargs:
T_max: 300
...
上述示例即为半周期为 300 Epochs 的余弦退火学习率调整器,学习率变化的范围为 0.0 到 1e-3。
从使用体验上来说,余弦退火学习率效果还是比较稳定的,用起来也比较省心。
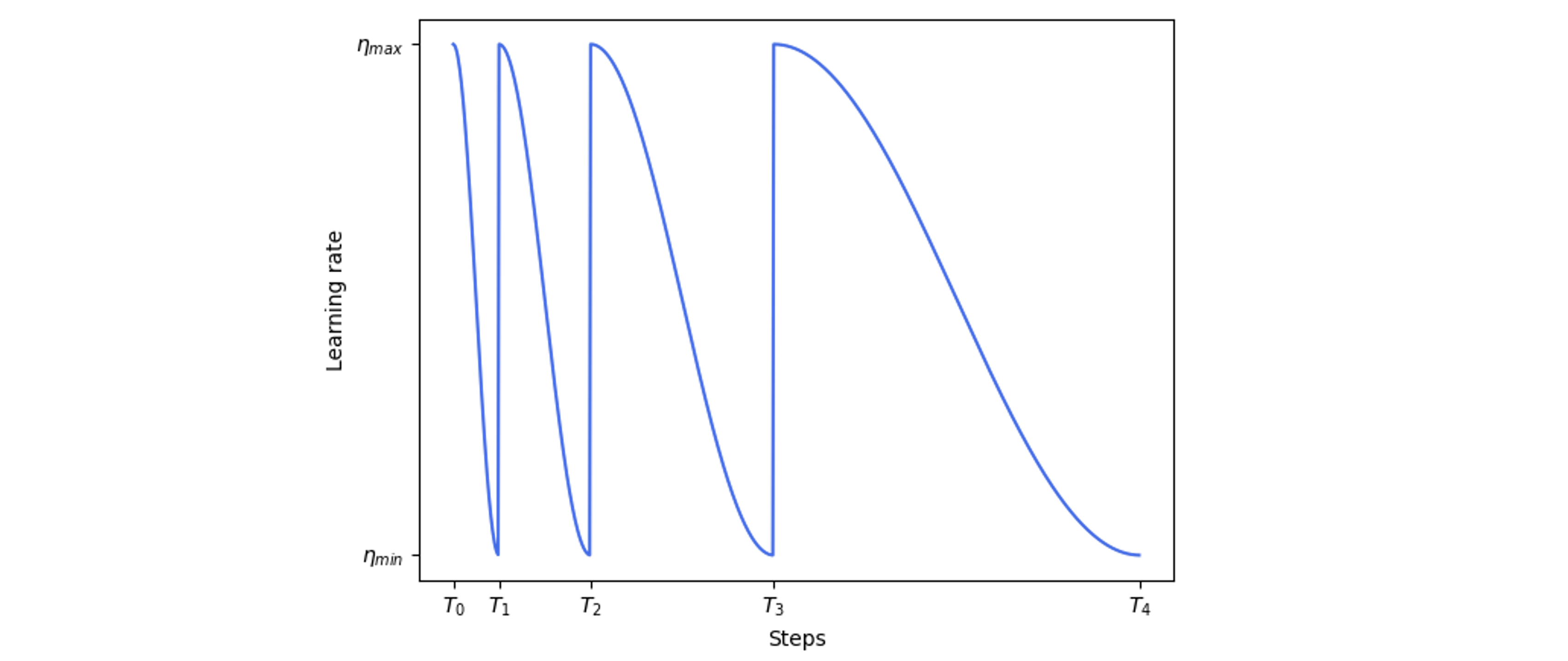
余弦退火热重启¶
与余弦退火不同,余弦退火冷重启到谷底时是慢慢回升到学习率最大值,而热重启到谷底时会立刻回到最大学习率。
但是每次余弦下降的半周期都会变为原先的 \(\mu\) 倍,即 \(T_{k+1} - T_k = \mu^k \tau\),\(\tau\) 为初始半周期。更直观的学习率变化图如图所示:
使用方法为:
trainer:
...
max_lr: 1e-3
min_lr: 0.0
lr_scheduler: cosine_restarts # cosine_annealing_warm_restarts
lr_scheduler_kwargs:
T_0: 50
T_mult: 2
...
这里 T_0 指初始半周期 Epoch 数,程序也同样会自动调整为步数,T_mult 指的是,每次重启之后半周期值都会乘以这个数,这里设置成 2,意思是每次重启,半周期都变为原来的两倍。
学习率平台衰减¶
当验证集误差连续若干 Epoch 未改善时,将学习率降低,直到学习率小于预设的最小学习率时结束训练。直接举例说明:
trainer:
...
max_lr: 1e-3
min_lr: 1e-6
lr_scheduler: reduce_on_plateau # plateau
lr_scheduler_kwargs:
factor: 0.5
patience: 50
...
意思是学习率从 1e-3 开始,如果连续 50 个 Epoch 验证集误差没有改善,就将学习率乘以 0.5,直到学习率小于 1e-6 停止训练。
提前停止训练¶
| 关键词 | 类型 | 默认值 | 描述 |
|---|---|---|---|
early_stoppings |
dict[str, dict[str, Any]] |
null |
字典的键是判断是否早停的性质名,值是另一个字典,用于设置早停的参数,可以设置复数个早停判断标准 |
early_stopping_mode |
str |
and |
and 表示只有所有判标都达到才停止,or 代表只要有判标达到就停止 |
我们直接举例解释
示例 1¶
trainer:
...
early_stoppings:
energy: {metric: mae, patience: 50, threshold: 0.0, lower_bound: 0.043}
forces: {metric: mae, patience: 50, threshold: 0.0, lower_bound: 0.043}
early_stopping_mode: and
意思是能量 MAE 连续 50 个 Epoch 没有降低或低于 0.043 时,满足能量早停条件;而力 MAE 连续 50 个 Epoch 没有降低或低于 0.043 时,满足力早停条件。当上述两个条件都满足时训练停止。
示例 2¶
trainer:
...
early_stoppings:
energy: {metric: rmse, patience: 100, threshold: 0.001}
forces: {metric: rmse, lower_bound: 0.043}
early_stopping_mode: or
意思是能量 RMSE 连续 100 个 Epoch 没有降低(降低小于 0.001 算作没有降低),即满足能量早停条件;而力 RMSE 小于 0.043 时则满足力早停条件。两者满足其中一项即停止训练。
但是啊,其实很多时候肉眼判断觉得训得差不多了,就是直接把作业停掉也是很常见的作法🤭。
指数移动平均¶
关键词 |
类型 |
默认值 |
描述 |
|---|---|---|---|
|
|
|
EMA 衰减因子 |
(Exponential Moving Average, EMA),在更新参数时维护一个模型影子参数。我们令 \(t\) 时刻的模型参数为 \(\theta_t\),影子参数为 \(v_t\),\(\theta_t\) 照常更新,影子参数更新方式为:
其中 \(\beta\) 就是 EMA 衰减因子。这样做可以理解为保留上一步 99.5% 的参数,只更新 0.5 % 的最新参数。至于为什么称作指数移动平均,是因为如果将上述的递推公式展开成通项公式,
通向公式可以看作一个级数求和,每一项的权重为 \(\left( 1 - \beta \right)\beta^{t-k}\),是一个指数函数,因此称为指数平均移动。
输出文件相关¶
关键词 |
类型 |
默认值 |
描述 |
|---|---|---|---|
|
|
|
保存 Checkpoint 文件、Loss 文件的路径 |
|
|
|
保存最好的 k 个 Checkpoint 文件 |
|
|
|
记录误差的文件的名字 |
|
|
|
每多少步记录一次 |
|
|
|
每多少轮记录一次 |
这里要注意的是 best_k 会保存最好的 k 个检查点文件,会以 0 - (k-1) 为后缀记录。
比如设置 best_k 为 3 时,会保存 run_name_0.pt、run_name_1.pt 和 run_name_2.pt这三个文件,但是要注意的是实际实现上使用一个大根堆实现的,所以这三个文件是没有大小顺序的,按照道理正常结束的训练会告诉你最好的是哪一个。
其他参数¶
| 关键词 | 类型 | 默认值 | 描述 |
|---|---|---|---|
max_epochs |
int |
300 |
最大训练 Epoch 数量 |
grad_clip |
float |
null |
梯度裁剪数值,确保参数梯度的范数不超过该设定值 |
seed |
int |
null |
随机数种子 |
num_workers |
int |
0 | 用于载入和预处理数据使用的额外 CPU 进程数 |